The self-driving car could transform our ideas of space and time, enabling us to do more of the things we love and less of the ones we loathe. Here are some of the most fascinating potential uses.

The self-driving car could transform our ideas of space and time, enabling us to do more of the things we love and less of the ones we loathe. Here are some of the most fascinating potential uses.

Toyota is funding the creation of a ‘flying car’ and it just took its first public test flight via NowThis.

From the understated opulence of a Bentley to the stalwart family minivan to the utilitarian pickup, Americans know that the car you drive is an outward statement of personality. You are what you drive, as the saying goes, and researchers at Stanford have just taken that maxim to a new level.
Using computer algorithms that can see and learn, they have analyzed millions of publicly available images on Google Street View. The researchers say they can use that knowledge to determine the political leanings of a given neighborhood just by looking at the cars on the streets.
“Using easily obtainable visual data, we can learn so much about our communities, on par with some information that takes billions of dollars to obtain via census surveys. More importantly, this research opens up more possibilities of virtually continuous study of our society using sometimes cheaply available visual data,” said Fei-Fei Li, an associate professor of computer science at Stanford and director of the Stanford Artificial Intelligence Lab and the Stanford Vision Lab, where the work was done.


The company rolled out the first of them for the U.S. on Thursday, a plug-in rechargeable Wrangler to go on sale in America, Europe and China early next year.
The Wrangler 4xe can go 25 miles (40 kilometers) on electricity before a 2-liter turbocharged four-cylinder engine takes over. Drivers can choose to have an engine-powered generator recharge the batteries (at a higher fuel consumption rate), although it would take about 2.5 hours at 45 to 55 mph (72.4 to 88.5 kilometers per hour) to fully replenish them.
A big driver of the new offerings is FCA’s obligation to meet fuel economy and pollution regulations in Europe, China, and the U.S. or face stiff fines or steep costs to buy electric vehicle credits from companies like Tesla.

A pioneer in Emotion AI, Rana el Kaliouby, Ph.D., is on a mission to humanize technology before it dehumanizes us.
At LiveWorx 2020, Rana joined us to share insights from years of research and collaboration with MIT’s Advanced Vehicle Technology group.
Part demo and part presentation, Rana breaks down the facial patterns that cameras can pick up from a tired or rested driver, and observations from the first ever large-scale study looking at driver behavior over time.
Learn how these inferences can be used to change the driving experience ➡️ https://archive.liveworx.com/sessions/artificial-emotional-intelligence-emotion-ai-what-it-is-and-why-it-matters
Today’s devices work hand-in-hand with humans –at work, home, school and play. Dr. Rana el Kaliouby believes they can do much more. An expert in artificial emotional intelligence, or “Emotion AI,” Dr. el Kaliouby explores the valuable applications of humanized technology in media and advertising, gaming, automotive, robotics, health, education and more. She explains how machine learning works, explores the potential for the development of emotion chips, and addresses the ethics and privacy issues of Emotion AI. In her talks, Dr. el Kaliouby gives participants an inside look at the world’s largest emotion data repositoryresults from her research studying more than 5 million faces around the world, and reveals that the emoji mindset may soon be a thing of the past.



Polestar may be a young brand, but its direction is clear: be the “guiding star” for the Volvo and Geely Car Groups when it comes to technology, performance, and sustainability.
Just last year, its debut car, the hybrid-electric two-door Polestar 1, began its initial production run to satisfy approximately 150 pre-orders. Deliveries are now underway, but Polestar – naturally – is already sailing forth towards its next phase, the all-electric five-door fastback Polestar 2.
Polestar’s latest brings the young brand’s future into sharper focus, distinguishing itself from its sibling brand Volvo while quite possibly outshining the competition, too.
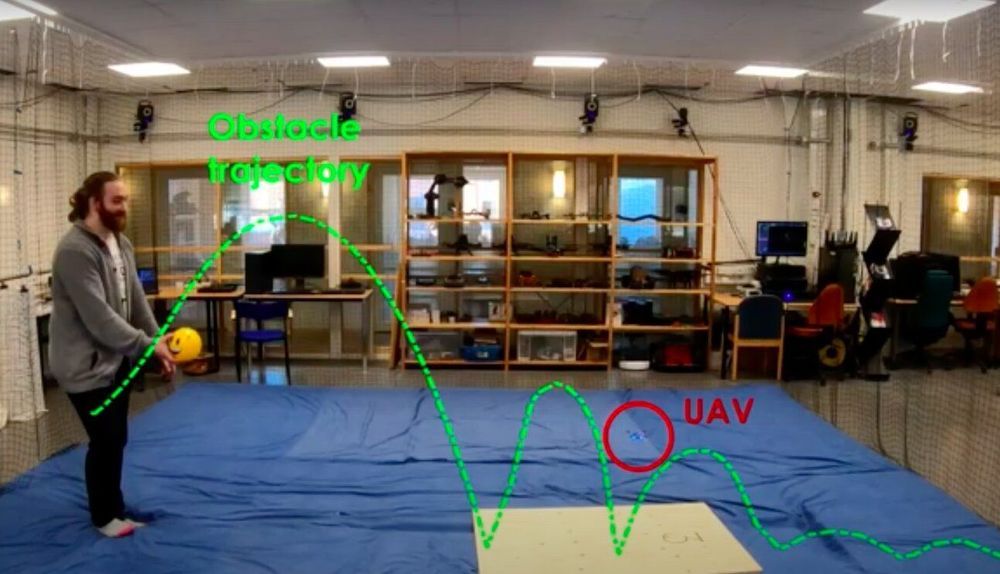
Autonomous unmanned aerial vehicles (UAVs) have shown great potential for a wide range of applications, including automated package delivery and the monitoring of large geographical areas. To complete missions in real-world environments, however, UAVs need to be able to navigate efficiently and avoid obstacles in their surroundings.
Researchers at Luleå University of Technology in Sweden and California Institute of Technology have recently developed a nonlinear model predictive control (NMPC)-based computational technique that could provide UAVs with better navigation and obstacle avoidance capabilities. The NMPC approach they used, presented in a paper published in IEEE Robotics and Automation Letters, is based on the structure of OpEn (Optimization Engine), a parametric optimization software developed by Dr. Pantelis Sopasakis at Queen’s University Belfast.
“Our team has previously published several works on autonomous obstacle avoidance and navigation for UAVs,” Björn Lindqvist, one of the researchers who carried out the study, told TechXplore. “In our recent study, we set out to extend the notion of obstacle avoidance to include a direct consideration of moving or dynamic obstacles, using NMPC. Our objective was to offer a technical demonstration of how modern and intelligent control structures could allow UAVs to be used in, for example, urban environments where the surroundings are always moving and where collision avoidance is of great importance to ensure the safety of persons and other vehicles.”
