Stanford’s made a lot of progress over the years with its gecko-inspired robotic hand. In May, a version of the “gecko gripper” even found its way onto the International Space Station to test its ability to perform tasks like collecting debris and fixing satellites.
In a paper published today in Science Robotics, researchers at the university are demonstrating a far more terrestrial application for the tech: picking delicate objects. It’s something that’s long been a challenge for rigid robot hands, leading to a wide range of different solutions, including soft robotic grippers.
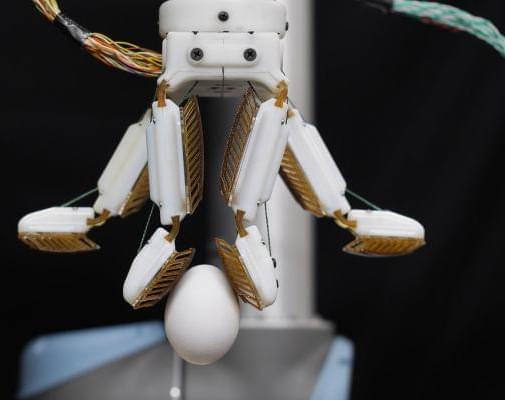
The team is showing off FarmHand, a four-fingered gripper inspired by both the dexterity of the human hand and the unique gripping capabilities of geckos. Of the latter, Stanford notes that the adhesive surface “creates a strong hold via microscopic flaps — Van der Waals force – a weak intermolecular force that results from subtle differences in the positions of electrons on the outsides of molecules.”