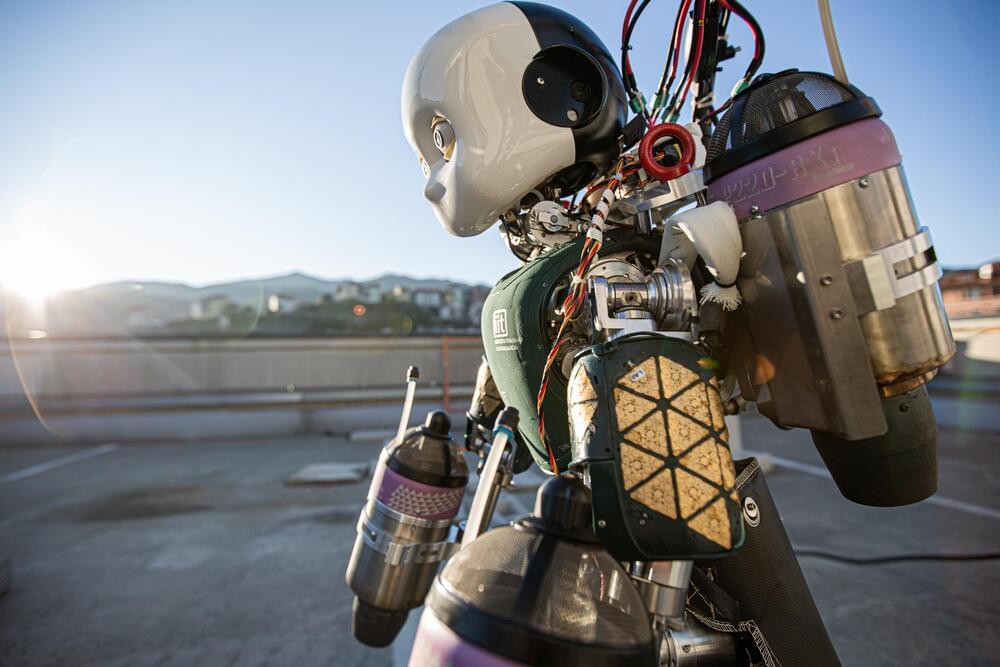
Researchers at the Italian Institute of Technology (IIT) have recently been exploring a fascinating idea, that of creating humanoid robots that can fly. To efficiently control the movements of flying robots, objects or vehicles, however, researchers require systems that can reliably estimate the intensity of the thrust produced by propellers, which allow them to move through the air.
As thrust forces are difficult to measure directly, they are usually estimated based on data collected by onboard sensors. The team at IIT recently introduced a new framework that can estimate thrust intensities of flying multibody systems that are not equipped with thrust-measuring sensors. This framework, presented in a paper published in IEEE Robotics and Automation Letters, could ultimately help them to realize their envisioned flying humanoid robot.
“Our early ideas of making a flying humanoid robot came up around 2016,” Daniele Pucci, head of the Artificial and Mechanical Intelligence lab that carried out the study, told TechXplore. “The main purpose was to conceive robots that could operate in disaster-like scenarios, where there are survivors to rescue inside partially destroyed buildings, and these buildings are difficult to reach because of potential floods and fire around them.”