Traditional robots can have difficulty grasping and manipulating soft objects if their manipulators are not flexible in the way elephant trunks, octopus tentacles, or human fingers can be.
In Applied Physics Reviews, investigators from Shanghai Jiao Tong University in China developed a type of multiple-segment soft manipulator inspired by these biological systems. The soft manipulators are based on pneu-nets, which are pneumatically actuated elastomeric structures.
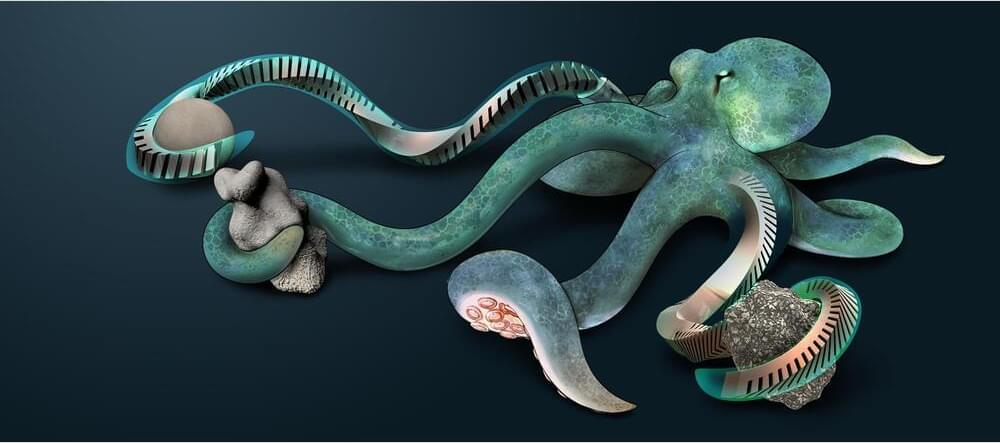
These structures have a tentaclelike shape and consist of a series of connected internal chambers which can be inflated pneumatically, blowing them up like a balloon. One side of the tentacle is highly flexible while the other is stiffer. Increasing air pressure to the chambers causes the structure to bend toward the stiff side.