At this point i think the US government is going to get stuck paying to develop human level robotic hands.
Over the past few decades, roboticists and computer scientists have developed a variety of data-based techniques for teaching robots how to complete different tasks. To achieve satisfactory results, however, these techniques should be trained on reliable and large datasets, preferably labeled with information related to the task they are learning to complete.
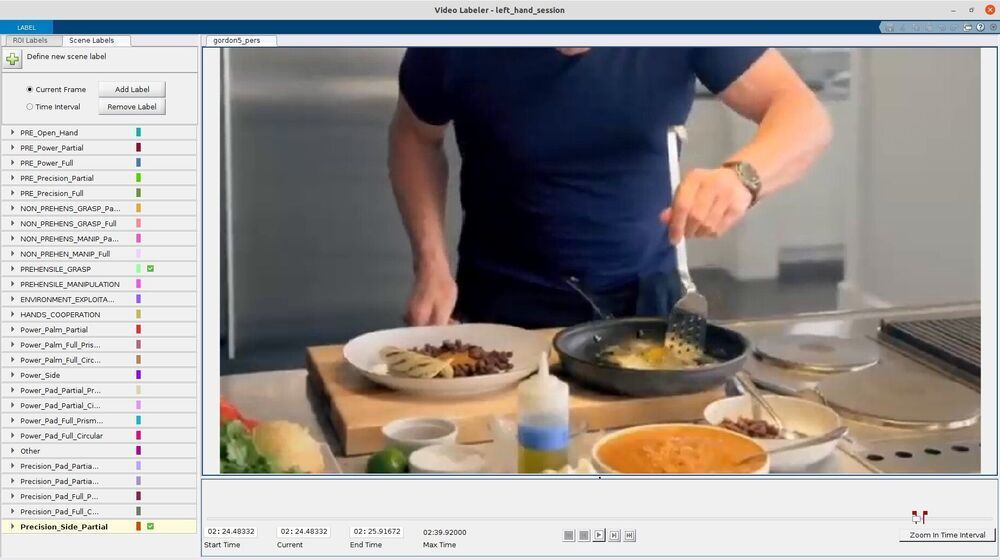
For instance, when trying to teach robots to complete tasks that involve the manipulation of objects, these techniques could be trained on videos of humans manipulating objects, which should ideally include information about the types of grasps they are using. This allows the robots to easily identify the strategies they should employ to grasp or manipulate specific objects.
Researchers at University of Pisa, Istituto Italiano di Tecnologia, Alpen-Adria-Universitat Klagenfurt and TU Delft recently developed a new taxonomy to label videos of humans manipulating objects. This grasp classification method, introduced in a paper published in IEEE Robotics and Automation Letters, accounts for movements prior to the grasping of objects, for bi-manual grasps and for non-prehensile strategies.