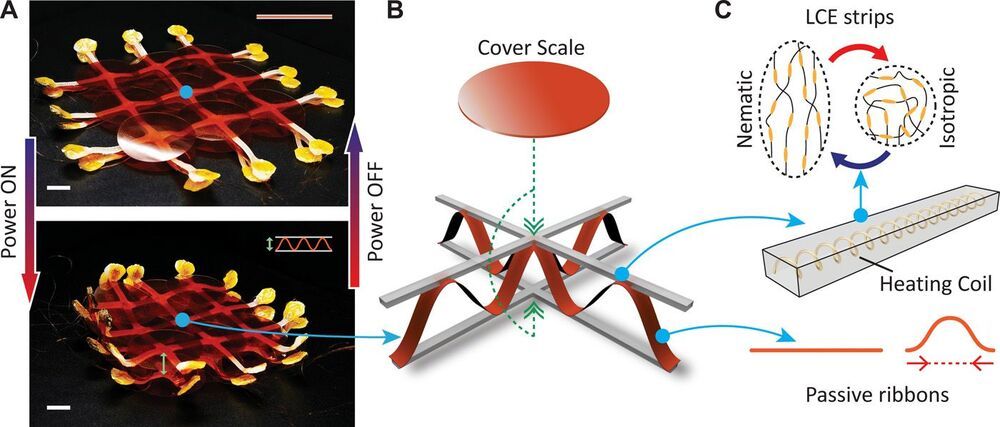
Continuous and controlled shape morphing is essential for soft machines to conform, grasp, and move while interacting safely with their surroundings. Shape morphing can be achieved with two-dimensional (2D) sheets that reconfigure into target 3D geometries, for example, using stimuli-responsive materials. However, most existing solutions lack the ability to reprogram their shape, face limitations on attainable geometries, or have insufficient mechanical stiffness to manipulate objects. Here, we develop a soft, robotic surface that allows for large, reprogrammable, and pliable shape morphing into smooth 3D geometries. The robotic surface consists of a layered design composed of two active networks serving as artificial muscles, one passive network serving as a skeleton, and cover scales serving as an artificial skin.