Researchers at Harvard University have recently devised a system based on Wi-Fi sensing that could enhance the collaboration between robots operating in unmapped environments. This system, presented in a paper pre-published on arXiv, can essentially emulate antenna arrays in the air as a robot moves freely in a 2-D or 3D environment.
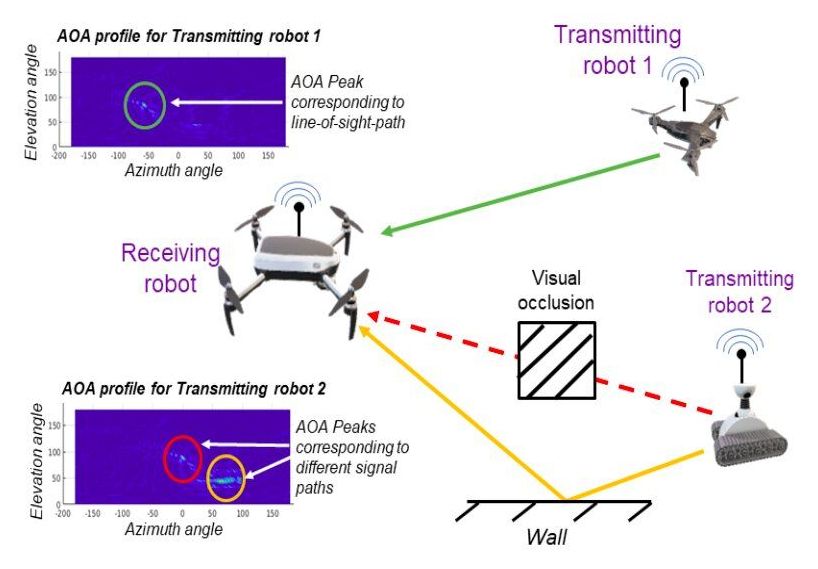
“The main goal of our paper was to leverage arbitrary 3D trajectories for a robot (UAV or UGV) equipped with an on-board trajectory estimation sensor,” Ninad Jadhav, one of the researchers who carried out the study, told TechXplore. “This allows a Wi-Fi-signal-receiving robot to estimate the spatial direction (in azimuth and elevation) of other neighboring robots by capturing all the wireless signal paths traveling between the transmitting and receiving robot (which we call AOA profile). Additionally, we also characterized how the trajectory shape impacts the AOA profile using Cramer Rao bound.”
In their previous studies, Jadhav and his colleagues focused on robot collaboration scenarios in which the robots followed 2-D trajectories with a limited set of geometries (e.g., linear or curved). The new system they created, on the other hand, is applicable to scenarios where robots are moving freely, following a wider range of trajectories.