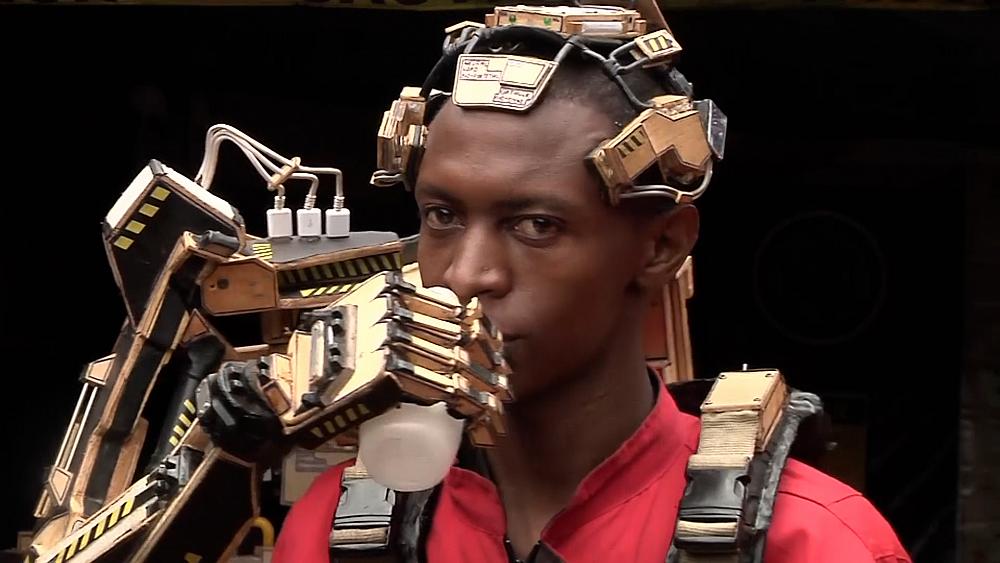
It was invented by David Gathu and Moses Kinyua and is powered by brain signals.
The signals are converted into an electric current by a “NeuroNode” biopotential headset receiver. This electrical current is then driven into the robot’s circuitry, which gives the arm its mobility.
The arm has several component materials including recycled wood and moves vertically and horizontally.
Juniorr Amenra.
· —3—h ·