Chameleons, salamanders and many toads use stored elastic energy to launch their sticky tongues at unsuspecting insects located up to one-and-a-half body lengths away, catching them within a tenth of a second.
Ramses Martinez, an assistant professor in Purdue’s School of Industrial Engineering and in the Weldon School of Biomedical Engineering in Purdue University’s College of Engineering and other Purdue researchers at the FlexiLab have developed a new class of entirely soft robots and actuators capable of re-creating bioinspired high-powered and high-speed motions using stored elastic energy. These robots are fabricated using stretchable polymers similar to rubber bands, with internal pneumatic channels that expand upon pressurization.
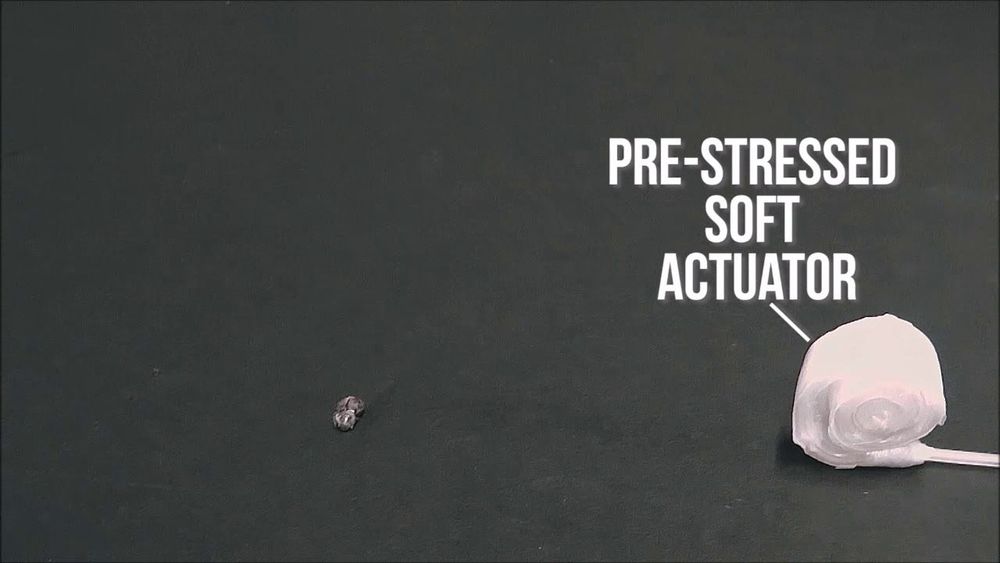
The elastic energy of these robots is stored by stretching their body in one or multiple directions during the fabrication process following nature-inspired principles. Similar to the chameleon’s tongue strike, a pre-stressed pneumatic soft robot is capable of expanding five times its own length, catch a live fly beetle and retrieve it in just 120 milliseconds.