https://youtube.com/watch?v=K0yNvk8JV-8
Bob Behnken and Doug Hurley made history getting to the space station. Now they’re coming home.

https://youtube.com/watch?v=K0yNvk8JV-8
Bob Behnken and Doug Hurley made history getting to the space station. Now they’re coming home.

Storage is just as important aboard the International Space Station as it is on Earth. While the space station is about the size of a football field, the living space inside is much smaller than that. Just as you wouldn’t store garden tools in a house when you could store them in a shed outside, astronauts now have a “housing unit” in which they can store tools for use on the exterior of the space station.
On Dec. 5, 2019, a protective storage unit for robotic tools called Robotic Tool Stowage (RiTS) was among the items launched to station as part of SpaceX’s 19th commercial resupply services mission for NASA. As part of a spacewalk on July 21, NASA astronauts Robert Behnken and Chris Cassidy installed the “robot hotel” where the tools are stored to the station’s Mobile Base System (MBS), where it will remain a permanent fixture. The MBS is a moveable platform that provides power to the external robots. This special location allows RiTS to traverse around the station alongside a robot that will use the tools it stores.


Carnegie Mellon today showed off new research into the world of robotic navigation. With help from the team at Facebook AI Research (FAIR), the university has designed a semantic navigation that helps robots navigate around by recognizing familiar objects.
The SemExp system, which beat out Samsung to take first place in a recent Habitat ObjectNav Challenge, utilizes machine learning to train the system to recognize objects. That goes beyond simple superficial traits, however. In the example given by CMU, the robot is able to distinguish an end table from a kitchen table, and thus extrapolate in which room it’s located. That should be more straightforward, however, with a fridge, which is both pretty distinct and is largely restricted to a singe room.

“D-Theory of Time, or Digital Presentism, gives us a coherent picture of temporal ontology: In the absence of observers, the arrow of time doesn’t exist — there’s no cosmic flow of time. With that in mind, your timeless cosmic self resides as a hyperdimensional being outside the ordinary space-time dimensionality of your experiential self… In fact, if we are to create high fidelity first-person simulated realities that also may be part of intersubjectivity-based, multiplayer virtualities, D-Theory of Time gives us a clear-cut guiding principle for doing just that.” –Alex M. Vikoulov, The Physics of Time: D-Theory of Time & Temporal Mechanics.
This designer theme, #DTheoryofTime, is currently offered in a variety of 67 high-quality products from fancy home decor and wall art to stylish clothing, gadgetry and accessories for you to make a bold statement, to stand out from the crowd or to simply keep you excited throughout the day:
https://www.redbubble.com/shop/ap/48940097
The snake bites its tail
Google AI can independently discover AI methods.
Then optimizes them
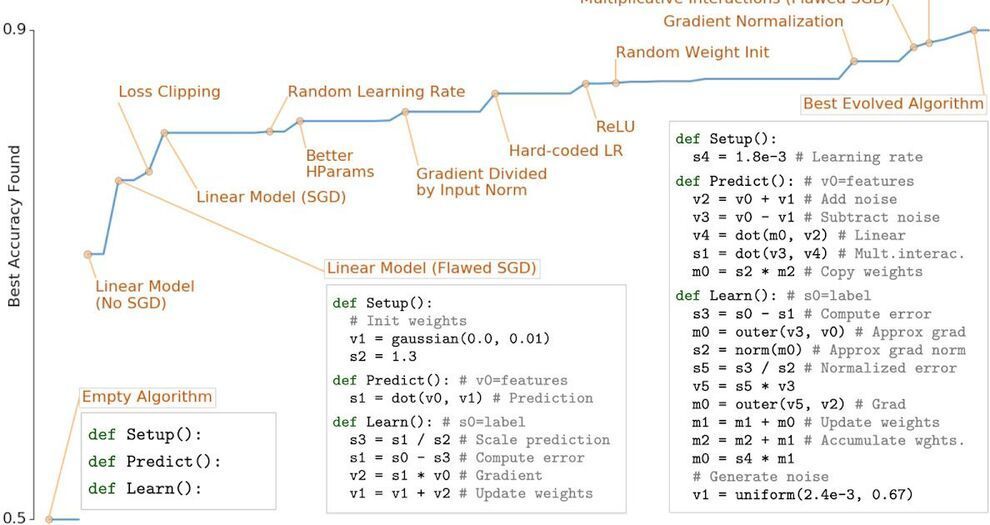
It Evolves algorithms from scratch—using only basic mathematical operations—rediscovering fundamental ML techniques & showing the potential to discover novel algorithms.
AutoML-Zero: new research that that can rediscover fundamental ML techniques by searching a space of different ways of combining basic mathematical operations. Arxiv: https://arxiv.org/abs/2003.
Machine learning (ML) has seen tremendous successes recently, which were made possible by ML algorithms like deep neural networks that were discovered through years of expert research. The difficulty involved in this research fueled AutoML, a field that aims to automate the design of ML algorithms. So far, AutoML has focused on constructing solutions by combining sophisticated hand-designed components. A typical example is that of neural architecture search, a subfield in which one builds neural networks automatically out of complex layers (e.g., convolutions, batch-norm, and dropout), and the topic of much research.
An alternative approach to using these hand-designed components in AutoML is to search for entire algorithms from scratch. This is challenging because it requires the exploration of vast and sparse search spaces, yet it has great potential benefits — it is not biased toward what we already know and potentially allows for the discovery of new and better ML architectures. By analogy, if one were building a house from scratch, there is more potential for flexibility or improvement than if one was constructing a house using only prefabricated rooms. However, the discovery of such housing designs may be more difficult because there are many more possible ways to combine the bricks and mortar than there are of combining pre-made designs of entire rooms. As such, early research into algorithm learning from scratch focused on one aspect of the algorithm, to reduce the search space and compute required, such as the learning rule, and has not been revisited much since the early 90s. Until now.
Extending our research into evolutionary AutoML, our recent paper, to be published at ICML 2020, demonstrates that it is possible to successfully evolve ML algorithms from scratch. The approach we propose, called AutoML-Zero, starts from empty programs and, using only basic mathematical operations as building blocks, applies evolutionary methods to automatically find the code for complete ML algorithms. Given small image classification problems, our method rediscovered fundamental ML techniques, such as 2-layer neural networks with backpropagation, linear regression and the like, which have been invented by researchers throughout the years. This result demonstrates the plausibility of automatically discovering more novel ML algorithms to address harder problems in the future.


Circa 2019
The European Space Agency (ESA) study is investigating how practical constructing a manned base on the moon only using 3D printing technology could be, given that it would rely primarily on lunar dirt for building materials.
“Terrestrial 3D printing technology has produced entire structures,” Laurent Pambaguian, who heads the project for ESA, said in a statement. “Our industrial team investigated if it could similarly be employed to build a lunar habitat.”
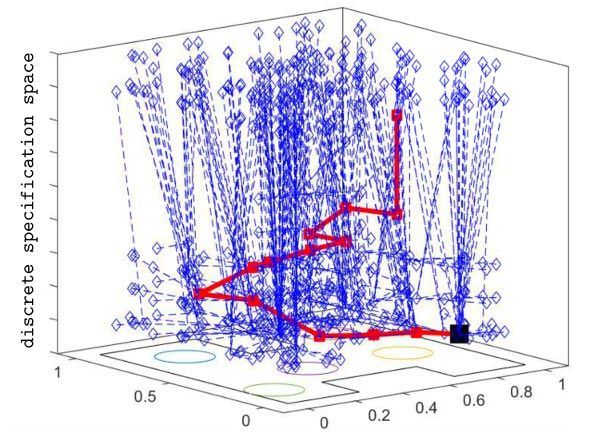
A new approach to designing motion plans for multiple robots grows “trees” in the search space to solve complex problems in a fraction of the time.
In one of the more memorable scenes from the 2002 blockbuster film Minority Report, Tom Cruise is forced to hide from a swarm of spider-like robots scouring a towering apartment complex. While most viewers are likely transfixed by the small, agile bloodhound replacements, a computer engineer might marvel instead at their elegant control system.
In a building several stories tall with numerous rooms, hundreds of obstacles and thousands of places to inspect, the several dozen robots move as one cohesive unit. They spread out in a search pattern to thoroughly check the entire building while simultaneously splitting tasks so as to not waste time doubling back on their own paths or re-checking places other robots have already visited.

A decade before Spaceballs, Winnebago thought about making RVs fly.