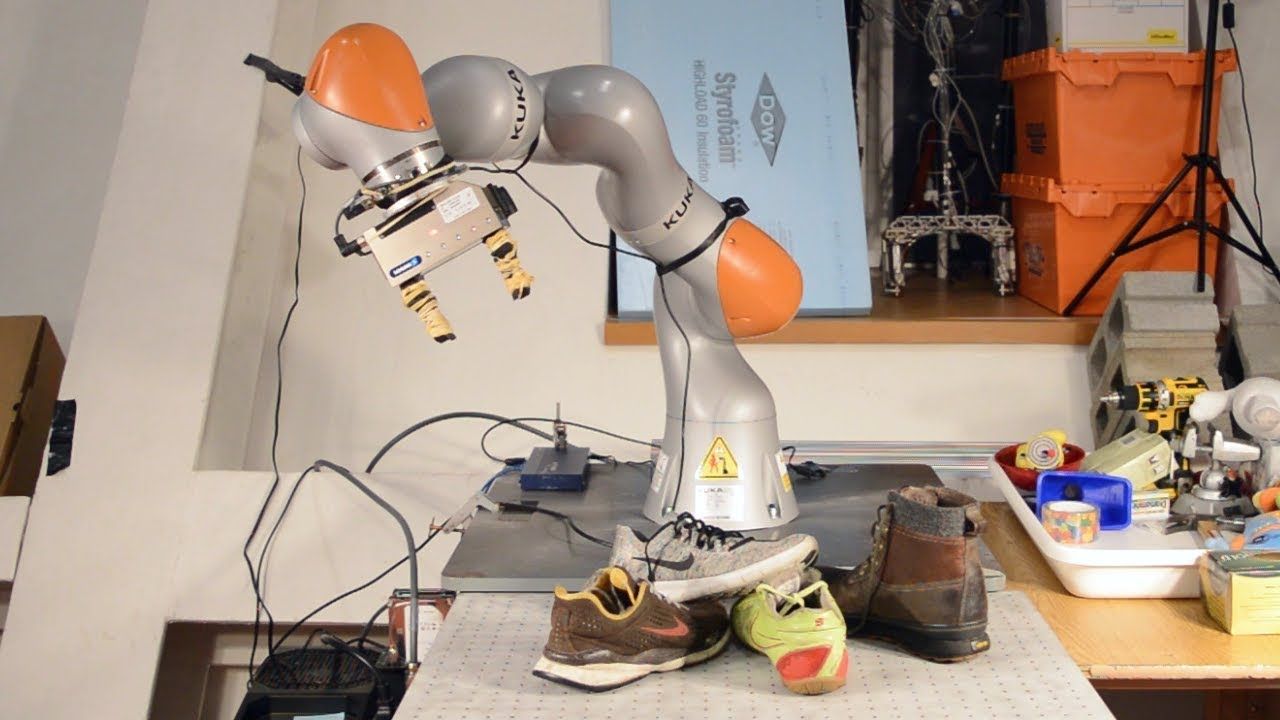
When we think of robots manipulating objects, we tend to think of endless banks of robot arms in some high-tech assembly line, dancing their mechanical dance in perfect synchronization. They grab an object, turn it round a bit, and put it down again, before repeating the action with an identical object time and again. But what if a robot could look at any item, and decide how best to pick it up, and perform tasks with it, all by itself? That’s the aim of DON – a new neural network and robotic hand at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL).
Read more