The challenge with bipedal robots isn’t so much getting them to walk at all (although that’s sometimes a problem) as it is getting them to walk naturally. They tend to either step cautiously or quickly run into trouble. Swiss researchers think they can do better, though: they’re working on COMAN (Compliant Humanoid), a headless robot designed to master walking. The automaton is more graceful through a combination of more flexible, elastic joints and a control algorithm that helps the bot understand its own body.
COMAN is aware of the symmetries in its dynamics and structure, which helps it not only walk with a natural gait but carry objects, navigate uneven surfaces like stairs, and react to surprises. If you push the robot, for instance, it knows exactly where to place its foot so that it doesn’t tip over like some of its peers. And thanks to that added flexibility, it’s more likely to survive that rudeness.
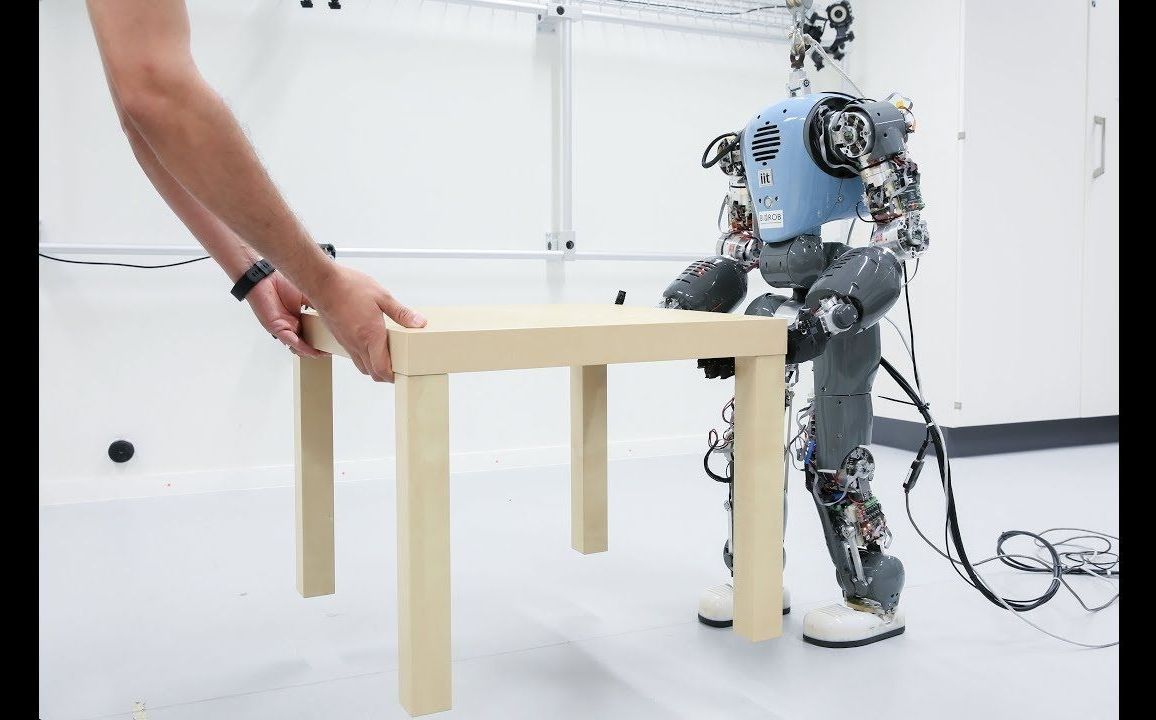
The technology is a long way from reaching robots you can interact with. For one thing, these machines would need ‘heads’ or some other way of exploring the world on their own. They may be particularly clever when they arrive, though. The team is also exploring the possibility of teaching bipedal robots t coordinate in shared actions, such as carrying a table. You could eventually see moving robots that have no problems hauling your couch down a flight of stairs.