In order to effectively navigate real-world environments, legged robots should be able to move swiftly and freely while maintaining their balance. This is particularly true for humanoid robots, robots with two legs and a human-like body structure.
Building robots that are stable on their legs while walking can be challenging. In fact, legged robots typically have unstable dynamics, due to their pendulum-like structure.
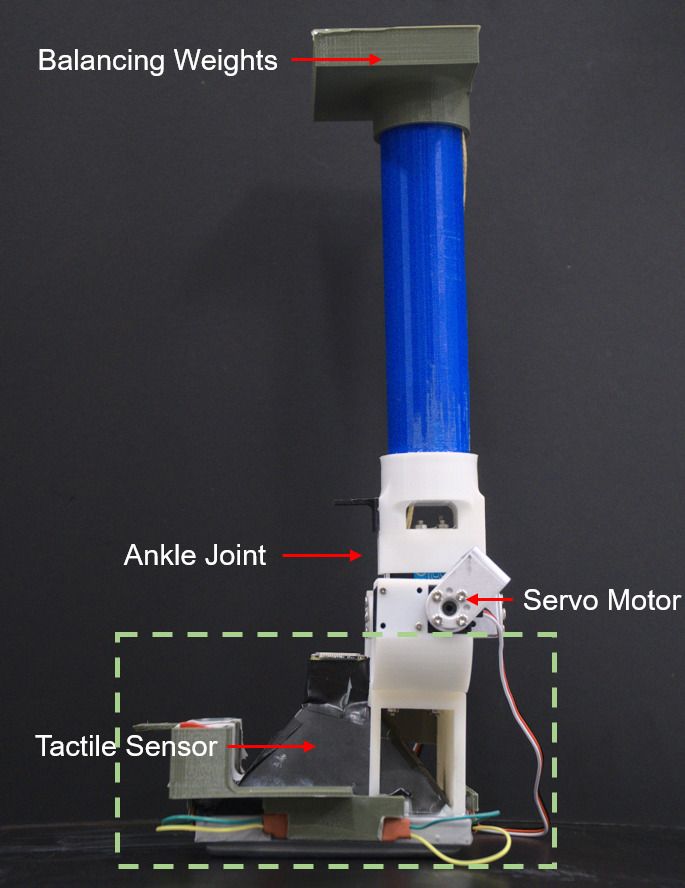
Researchers at Hong Kong University of Science and Technology recently developed a computer vision-based robotic foot with tactile sensing capabilities. When integrated at the end of a robot’s legs, the artificial foot can increase a robot’s balance and stability during locomotion.