I was so wrong.
Last week, Drs. Marc Miskin*, Itai Cohen, and Paul McEuen at Cornell University spearheaded a collaboration that tackled one of the most pressing problems in microrobotics—getting those robots to move in a controllable manner. They graced us with an army of Pop-Tart-shaped microbots with seriously tricked-out actuators, or motors that allow a robot to move. In this case, the actuators make up the robot’s legs.
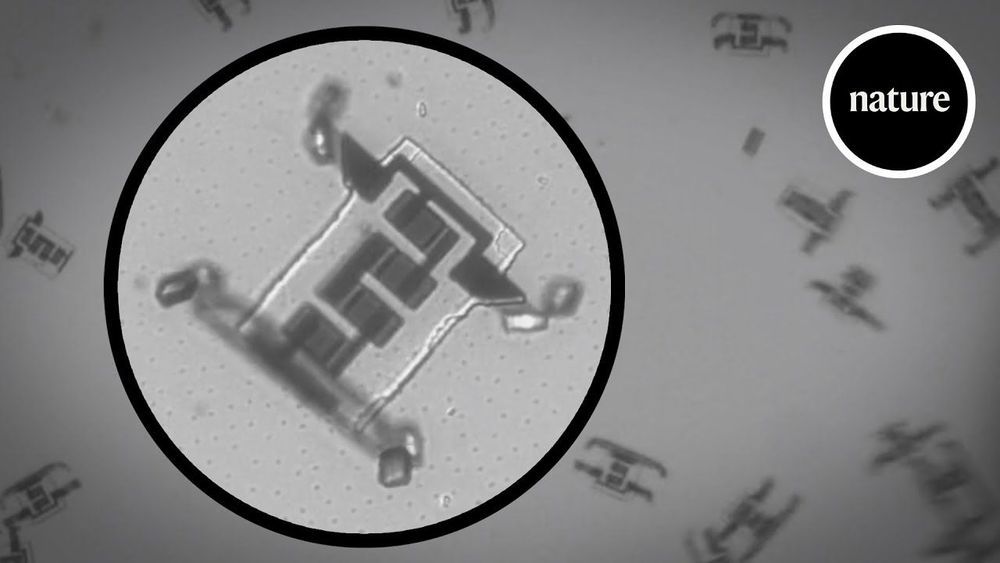
Each smaller than the width of a human hair, the bots have a blocky body equipped with solar cells and two pairs of platinum legs, which can be independently triggered to flex using precise laser zaps. The control is so accurate that the team was able to simultaneously jigger the legs of a battalion of microbots in a coordinated “march.”